2022年02月28日
© 2022 Patrick Han
東北大学材料科学高等研究所(AIMR)が率いる研究チームが、外部からのエネルギーの供給を必要とせずに、物質をピックアップ場所から受け取り場所まで運ぶ動作を繰り返す液体ロボットシステムを開発した1。
マイクロまたはミリサイズの極小ロボットの究極形は、体内での薬物送達から海洋規模での汚水処理にいたるまで多種多様なタスクを、電源ケーブルなしでこなすことができるロボットである。この理想に到達するためには、推進力、自律性、タスクデザインなどロボットの機能を決定する特性をそれぞれオーダーメイドで作り上げる必要があることから、複数の専門分野にまたがることが一般的だ。
研究チームは、昆虫におけるメニスカスクライミングの物理学的なメカニズムと水性2相系の化学的性質を組み合わせて液滴ロボットを開発した。
「水生昆虫の中には、毛管力の仕組みを利用して、脚と水面の接触角度を変えることで水のメニスカス表面を上ったり下りたりするものがいます」と湖南大学のGanhua Xie教授は説明する。「周囲の液体に対する液滴の相対的な高さを利用して接触角度を変えることで、この昆虫のロコモーションを模倣することができると考えました」。
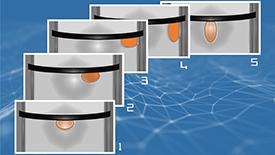
このアイデアを実証するため、AIMRが率いる研究チームは試験管内でデキストラン水溶液の液滴を塩分を含むポリエチレングリコール(PEG)水溶液の表面に置いた(図参照)。試験管の側面に到達するまでは、液滴はPEG溶液のメニスカス上を滑るように上って行くが、その過程でPEG溶液から塩分を抽出して比重が増加し、いったん側面に到達すると、今度は徐々にチューブの中央に向かって下りていく。
このメカニズムを使って、研究チームは液体ロボットに推進力、自律性、タスクデザインを実装した。
カタラーゼを加えて液滴の表面に官能器を導入すると、PEG溶液内の過酸化水素(H2O2)と反応して酸素の気泡が生じる。この酸素の気泡が液滴の表面に接触している間は、気泡が液滴を持ち上げるが、気泡が大きくなって液滴の表面から離れると液滴は下に落ちる。このメカニズムを用いることで、過酸化水素が消費され尽くすまで液滴をメニスカスの上部と下部の間で往復させることができる。
また、たとえば試験管の側面に塩分を含んだ物質を使ってピックアップ用ゾーンを用意し、受け取り用液滴をチューブの中央に置いておくことで、液滴のマイクロロボットが自動的に試験管の側面まで移動して塩分を抽出し、受け取り用液滴まで戻って荷物(塩分)を渡すという動作をひたすら繰り返す仕組みを作ることもできる。
「これまでの研究では、外部からのエネルギー供給なしで液体ロボットに特定のタスクを実行させることはできましたが、たった一度きりでした」とAIMRのThomas Russell教授は語る。「我々のデザインは、化学特性を応用することで従来のロボティクスの壁を破り、物体の浮力を制御することに成功しました」。
研究チームは今後、より大規模なシステムにこの技術を適用する手法を開発していく予定である。
(原著者:Patrick Han)
このリサーチハイライトは原著論文の著者の承認を得ており、記事中のすべての情報及びデータは同著者から提供されたものです。