01/31/2022
© 2022 Patrick Han
An AIMR-led research team has designed a liquid-robot system that can autonomously transport cargo from a pickup to a drop-off location repeatedly and continuously without external energy input1.
The ultimate micro/milli-robots are small, untethered objects that can perform tasks ranging from targeted drug delivery to ocean-wide sewage treatment. To this end, robotics research often intersects disciplines to tailor defining features such as propulsion, autonomy, and task design.
Here, the team crosses the physics of insect meniscus-climbing mechanics with the chemistry of aqueous two-phase systems to fabricate droplet robots.
“Aquatic insects use capillary forces to glide up and down a water meniscus by changing the contact angle between their bodies and the water surface,” says Ganhua Xie of Hunan University. “We can mimic this mechanism using the relative height of a droplet to its liquid surrounding to change the contact angle.”
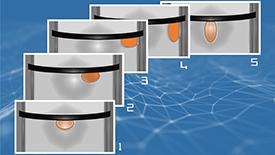
To demonstrate, the team places a dextran droplet at the surface of a salt-laden polyethylene-glycol (PEG) solution in a test tube (see Figure). Initially, the droplet glides up the PEG meniscus to the test-tube wall; as its density increases through salt extraction, the droplet glides down the meniscus back to the test-tube center.
Using this mechanism, the team implements propulsion, autonomy, and task design.
By functionalizing the droplet wall with catalase, its reaction with H2O2 in the PEG solution produces O2 bubbles that lift the droplet up when attached to the wall, and drop the droplet down when they grow and detach from the wall, shuttling the droplet up and down the meniscus until the H2O2 runs out.
Or, by designing the test-tube wall as the salt-laden pickup zone and a recipient droplet at the center of the tube, a droplet microrobot can autonomously shuttle to the wall to extract the salt, shuttle back to the recipient to drop off the cargo, and repeat until task completion.
“Previous studies only demonstrated liquid robots performing a task once without external energy,” says Tom Russell from AIMR. “Our design breaks this barrier using chemistry to control an object’s buoyancy.”
A future direction will focus on scaling up this technology for larger systems.
(Author: Patrick Han)
This research highlight has been approved by the authors of the original article and all information and data contained within has been provided by said authors.